
CLAWINO: The Ideal Real Time Claw Machine To Play With Your Smartphone
These machines exist almost in every country in the world.
Almost every person has played these machines at least once,
and the chances to win a prize with them are ridiculously low (but that is off topic 😉).
We are talking about CLAW ARCADE MACHINES!
Let’s first explain what a claw machine exactly is, for people who came from space.
Basically, it’s a 3 axis motorized machine – one can control a crane
and move it forward, backward, left, right, up, down, catch, and release.
Our client enables playing real claw machines through live video streaming,
and real prizes are being delivered to the winner’s doorstep. How cool is that?
Since RT and UX are very important for them, their request was a machine with zero response time and full of cool features, so we made them one.
We call it Clawino!
After reverse engineering the client’s current product,
we discovered weaknesses and did as follow:
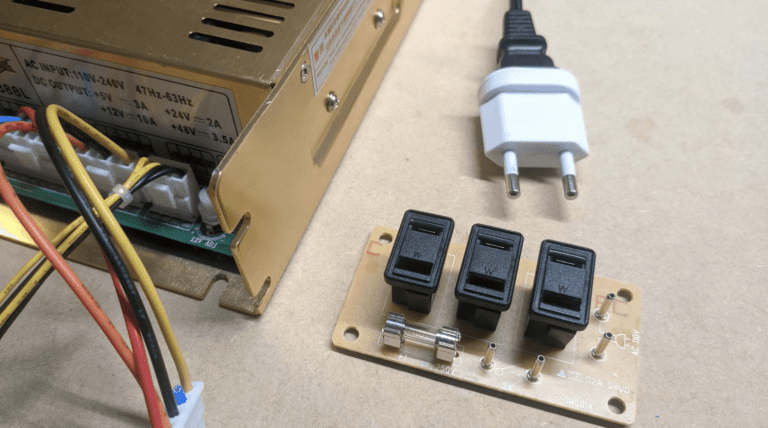
1. High Voltage Safety –
The power supply comes with a groundless two-strand American cable.
The power supply is also connected to a PCB, with an exposed fuse,
screwed to a flammable wooden surface.
We disassembed the power supply’s cover, replaced to a 3-wire cable with a casted Israeli plug. Now, 220V AC goes directly to a grounded power supply which is connected to the machine’s metal chassis and ground it as well – it is important in the event of a fault in the power supply where 220V AC will leak to the 24V DC power line and from there to user electrification . When everything is grounded the current will flow to ground and trigger the electric breaker on the electrical panel as required.
You know what they say, “Safety first!” 😉
2. Improving Response Time –
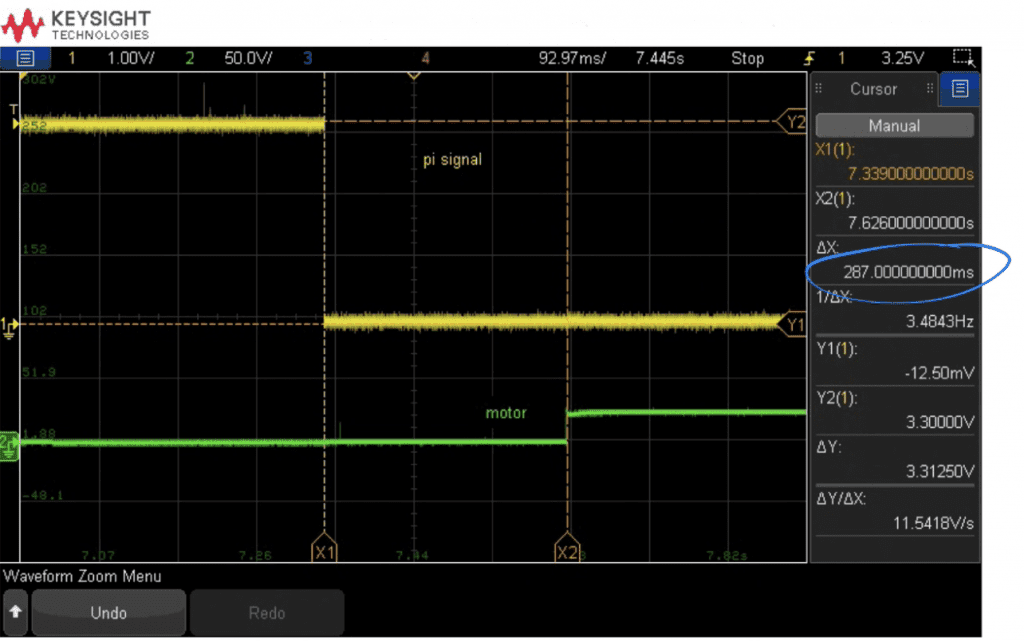
We found a huge delay from the moment a command has been sent to the motor until the beginning of its movement (receiving current).
The problem stems from the use of thier original machine’s controller that contains relays, which are electro-mechanical switches, among other things.
Our solution was to use only electronic and programmatic switching along the entire route between the controller and the motors.
We designed a circuit board from scratch, coded a dedicated operating system with many options, and implemented a POC.
After checking timings with an oscilloscope we discovered HUGE improvments!
The results are here:
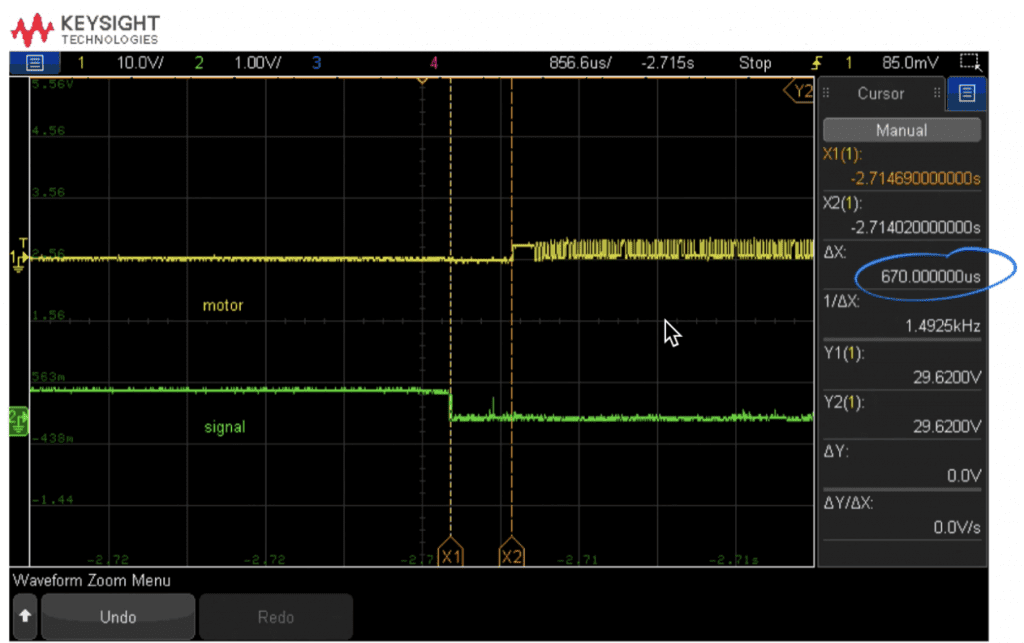
You are not dreaming, we almost zeroed the latency!
287 ms turned to 670 us!
We think it is incredible, are you?
If it sounds nothing to you, consider the time for a bi-directional movement in 3 axis
while controlling the machine remotely over Wifi/Internet – now sum those up.
Wouldn’t you be upset as a user who is trying to catch a prize, but can’t due to many reasons such as poor connectivity, bad machine setup, weak video streaming, etc. ?
I know I would…
3. Improving Capabilities –
The original machine’s controller is a closed and cumbersome system which doesn’t allow the addition of sensors, action logic, read and write settings remotely, etc.
With Clawino, it is possible to read & write parameters remotely, read machine’s status in case of malfunction, such as motor or toy is stuck, control claw position, read number of toys dropped and more. Generally, for our team, any additional feature that comes up to your mind is possible to make. Just say the word 🙂
4. Simplicity –
Assembling the machine requires a lot of knowledge and their original controller contains cumbersome wiring and many components that increase the chance of failure and make it difficult to find faults manually.
Our new infrastructure is super simple: RaspberryPi + Expansion Board + Power Supply + Sensors.
A picture that shows the simplicity and elegance is attached bellow.
In addition, the interface with the RPi won’t include many GPIOs anymore – disconnection of one may cause a malfunction. Instead it will be controlled using Serial Communication. One USB cable and you are ready to go!
The final stage was integration.
At this point we brought our system to the studio, set up a testing machine and connected it to the RPi. We ran a series of tests with a variety of possible sequences to verify the reliability of the system and measured its performance using Scoop.
And… VOILA, you got yourself an IDEAL CLAW MACINE.
